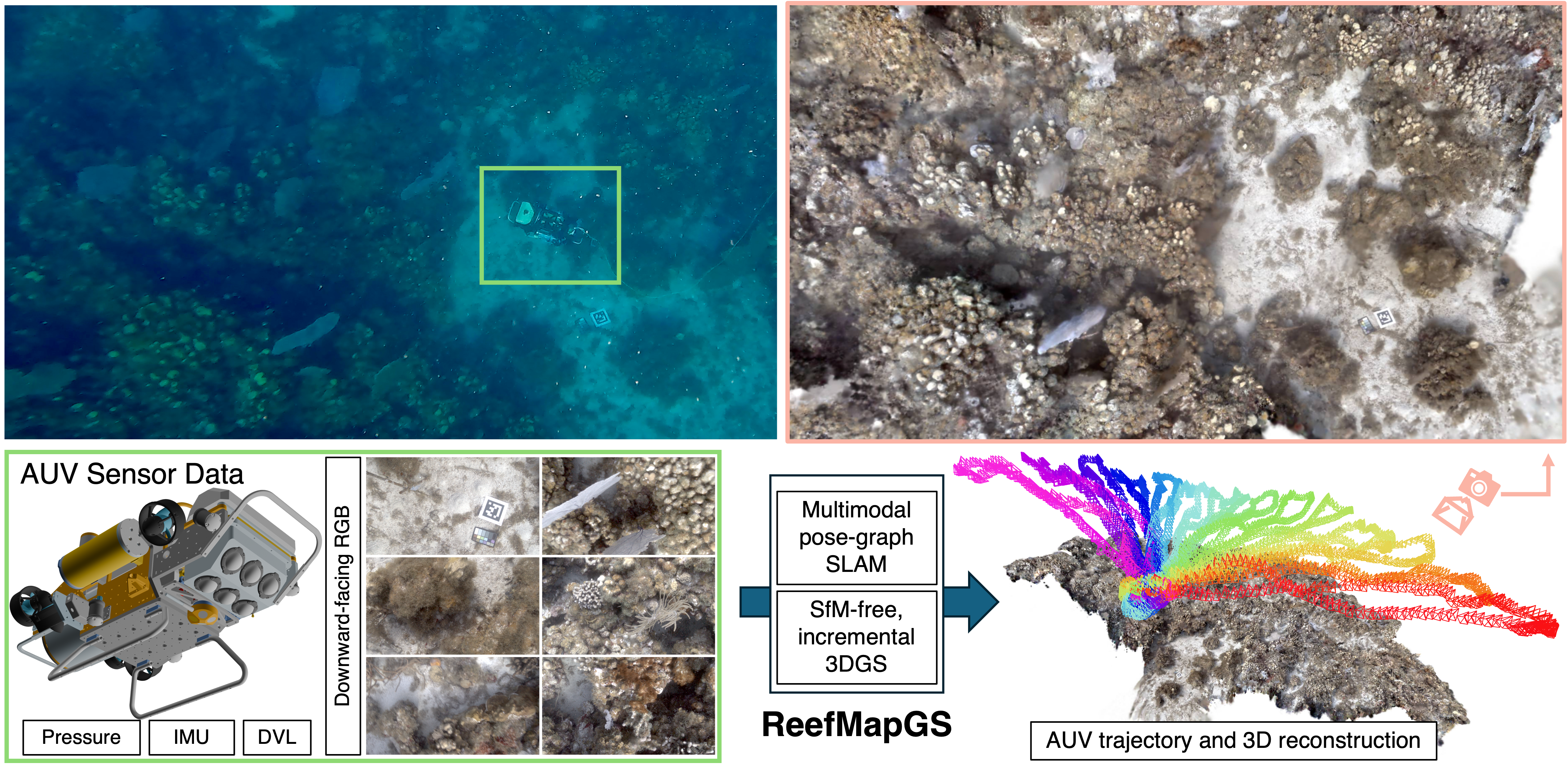
3D Gaussian Splatting is a powerful visual representation, providing high-quality and efficient 3D scene reconstruction, but it is crucially dependent on accurate camera poses typically obtained from computationally intensive processes like structure-from-motion that are unsuitable for field robot applications. However in these domains, multimodal sensor data from acoustic, inertial, pressure, and visual sensors are available and suitable for pose-graph optimization-based SLAM methods that can estimate the vehicle's trajectory and thus our needed camera poses while providing uncertainty. We propose a 3DGS-based incremental reconstruction framework, ReefMapGS, that builds an initial model from a high certainty region and progressively expands to incorporate the whole scene. We incrementally reconstruct the whole scene by interleaving local tracking of new image observations with optimization of the underlying 3DGS scene. These refined poses are integrated back into the pose-graph to globally optimize the whole trajectory. We show COLMAP-free 3D reconstruction of two underwater reef sites with complex geometry as well as more accurate global pose estimation of our AUV over complex foveated survey trajectories spanning up to 700 m.
@article{yang2026reefmapgs,
author = {Yang, Daniel and Hong, Jungseok and Leonard, John J. and Girdhar, Yogesh},
title = {ReefMapGS: Enabling Large-Scale Underwater Reconstruction by Closing the Loop Between Multimodal SLAM and Gaussian Splatting},
journal = {arXiv preprint arXiv:2604.11992},
year = {2026}
}